1. 레이더 송수신기 구조
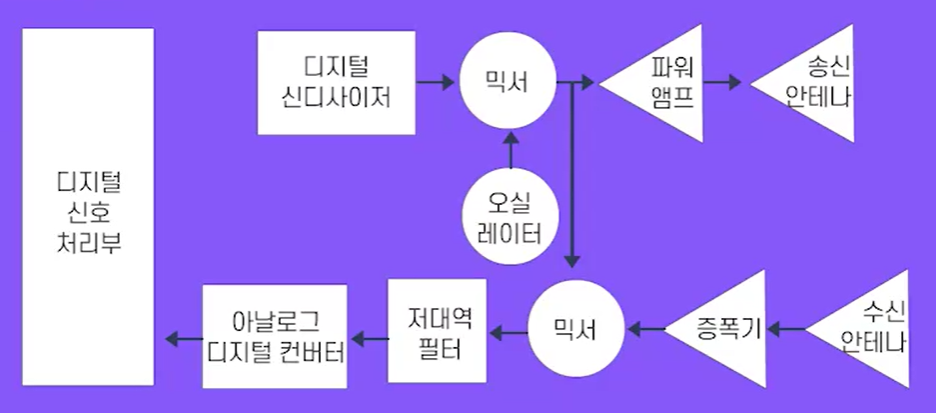
1. 디지털 신디사이저를 이용해 FMCW 송신 신호 발생 -> 2. 오실레이터의 반송파에 FMCW 송신 신호를 실어서 안테나를 통해 송신 -> 3. 시간적으로 지연된 반사 신호가 수신 안테나를 통해 수신 -> 4. 송신 신호와 수신신호를 곱하여 저대역 필터 통과 -> 5. 비트주파수 성분 생성 -> 6. ADC를 이용해 비트 주파수 성분을 디지털 신호로 변환 -> 7. 디지털 신호로 변환되면 FFT를 적용해서 주파수 성분을 추출 -> 8. 주파수 성분을 디지털 신호로 처리해서 물체의 상대거리와 속도를 측정
2. 레이더 신호처리 기술
1) 믹서
- 송신 신호와 수신 신호를 곱하여 두 신호의 주파수와 합과 차를 주파수로 갖는 신호를 발생시킴
2) 저대역 필터
- 주파수의 차 성분 신호(비트 주파수 성분)를 원하기 때문에 주파수의 합 성분 신호를 걸러내기 위해 저대역 필터를 사용
- 고주파 신호를 걸러내고 저주파 신호만을 그대로 통과시키는 필터
3) 아날로그 디지털 컨버터(ADC)
- 아날로그 신호를 디지털 신호로 변환해 주는 시스템
4) 고속 푸리에 변환(Fast Fourier Transform)
- 비트 주파수 성분 분석을 통해 물체 검출
- 고속 푸리에 변환 적용 시 -> 시간에 따라 변화하는 주파수 성분 분석 -> 임계값(Threshold)과 비교하여 물체 검출
5) CFAR(Constant false alarm rate) 검출기
- 오탐률을 일정하게 하는 검출기
- 시간-주파수 성분의 에너지를 임계값(Threshold)과 비교하여야 함
- 주변의 잡음 환경에 따라 임계값(Threshold)을 적응적으로 조절 -> 정해진 오탐률 유지
퀴즈)
1. 다음 보기 중 레이더 센서의 특징이 아닌 것은 무엇인가?
1. 클러터의 영향으로 오탐률이 높다는 단점이 있다.
2. 전자기파는 날씨, 밝기, 시야 가림 등의 환경 변화에 약하다.
3. 자율주행차에는 24GHz와 77GHz 부근의 주파수 대역이 사용된다.
4. 전통적으로 군사용 목적으로 많이 사용되었다.
답 2
2. 다음 중 배열 안테나를 이용한 각도 측정에 대한 설명 중 옳지 않은 것?
1. 하나 이상의 안테나 원소로 구성된 배열 안테나를 이용한다.
2. 수신된 신호의 위상차이를 이용하여 수신신호의 각도를 추정한다.
3. 안테나 원소의 개수가 많을수록 각도 측정값의 해상도를 높일 수 있다.
4. 송신된 신호의 위상 차이를 이용하여 수신신호의 각도를 추정한다.
'전자공학 > 자율주행' 카테고리의 다른 글
| [H-모빌리티 클래스 자율주행 인지 기초 내용 정리] 15. 라이다 센서 종류 및 개요 (0) | 2022.02.12 |
|---|---|
| [H-모빌리티 클래스 자율주행 인지 기초 내용 정리] 14. 레이더 기반 물체 검출 기술 (0) | 2022.02.12 |
| [H-모빌리티 클래스 자율주행 인지 기초 내용 정리] 12. 레이더 신호 특성 (0) | 2022.02.12 |
| [H-모빌리티 클래스 자율주행 인지 기초 내용 정리] 11. 레이더 센서 종류 및 작동원리 (0) | 2022.02.11 |
| [H-모빌리티 클래스 자율주행 인지 기초 내용 정리] 10. 카메라 기반 영역 분할 기술 (0) | 2022.02.11 |

댓글