반응형
1. 카메라 센서 원리
1) 카메라 렌즈를 통해 들어온 빛을 전기적인 신호로 변환해서 주변에 대한 정보 제공
- 빛 -> CCD(Charge Coupled Device), CMOS(Complementary Metal-Oxide-Semicondutor) 이미지 센서에 영상 투사
2) 카메라 구성 : 몸체, 렌즈, 조절장치(조리개,셔터)
3) 초점 거리 : 렌즈의 중심에서부터 필름에 영상이 맺히는 사이의 거리
4) 화각 : 화면을 구성하는 각도
- 렌즈의 초점 거리가 짧으면 화각이 넓어짐 -> 광각렌즈
- 망원렌즈 < 표준렌즈 < 광각렌즈 < 어안렌즈 순으로 화각이 넓어짐

2. 카메라 구조
1) 핀홀 카메라
- 핀홀, 즉 작은 구멍을 통해서 빛을 받아들임
- 초점 거리에 따라 물체 크기 변화

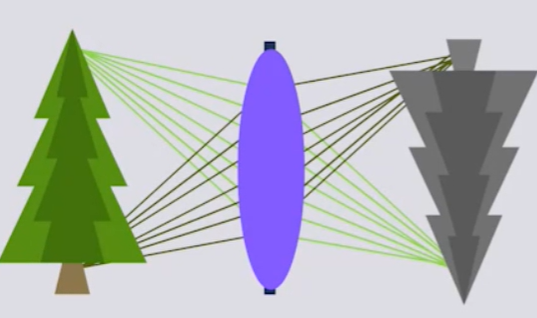
2) 렌즈 카메라
- 렌즈의 빛의 굴절 특성 이용
- 렌즈에 의한 왜곡 보정 필요
3. 영상의 표현 방법
1) x축 y축 2차원 배열로 표현
- 해상도 : 배열의 크기
- 픽셀 : 배열의 원소
2) 프레임 비율 : 1초 동안 보여주는 영상 프레임 수
3) RGB 영상의 색상 표현 : 적색 Red, 녹색 Green, 청색 Blue
퀴즈)
카메라 센서는 카메라 렌즈를 통해 들어온 빛을 어떠한 신호로 변환하는 것인가요?
1. 아날로그 신호
2. 전기적 신호
3. 음성 신호
4. 통신 신호
답 2
반응형
'전자공학 > 자율주행' 카테고리의 다른 글
| [H-모빌리티 클래스 자율주행 인지 기초 내용 정리] 9. 카메라 기반 물체 검출/추적 기술 (0) | 2022.02.11 |
|---|---|
| [H-모빌리티 클래스 자율주행 인지 기초 내용 정리] 8. 카메라 캘리브레이션(보정) 기술 (0) | 2022.02.11 |
| [H-모빌리티 클래스 자율주행 인지 기초 내용 정리] 6. 딥러닝 기반 인지시스템 사례 (0) | 2022.02.11 |
| [H-모빌리티 클래스 자율주행 인지 기초 내용 정리] 5. 인지를 위한 딥러닝 기술 개요 (0) | 2022.02.11 |
| [H-모빌리티 클래스 자율주행 인지 기초 내용 정리] 4. 인지를 위한 AI 기술 (0) | 2022.02.11 |



댓글