반응형
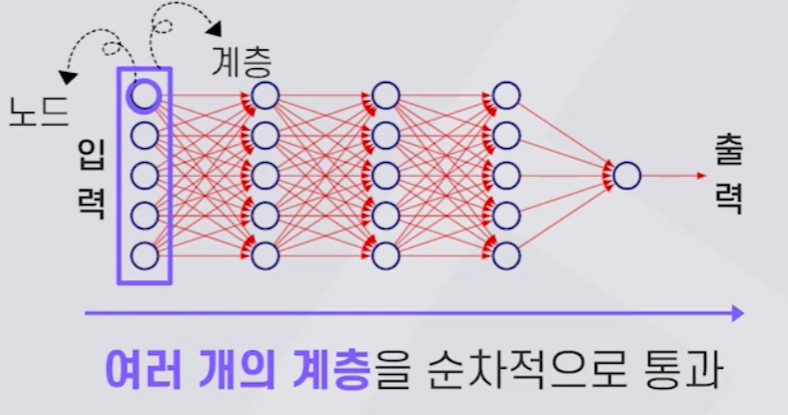
1. 딥러닝 모델의 신경망 구조
1) 센서 데이터를 입력받아 원하는 결과를 출력
2) Feed-forward 신경망 구조
- 수 많은 노드들의 집합 / 노드(입력을 받아 비선형 연산을 수행하고 결과를 출력하는 기본적인 단위)
2. 딥러닝의 학습 과정
1) 트레이닝
- 수많은 학습 데이터를 보여주고 정답을 제대로 낼 수 있도록 신경망의 연결여부를 결정해주는 과정
- 수많은 데이터 학습 -> 계산 -> 신경망 연결
2) 인퍼런스
- 트레이닝이 끝나면 딥러닝 모델을 자율주행차에 탑재하여 실제 인지 기능 수행
3. 인지를 위한 딥러닝 기술
1) Convolutional Neural Network(CNN)
- 카메라 영상을 입력으로 하여 원하는 결과를 얻어냄
- 2차원 배열 데이터를 처리하기에 유리한 구조
- 자율주행차 적용 사례 : 카메라 영상을 기반으로 동적 객체와 정적 객체 검출
2) Recurrent Neural Network(RNN)
- 시간적으로 순차적으로 들어오는 데이터를 입력으로 하여 원하는 출력을 얻어냄
- 음성인식, 자연어처리, 시계열 데이터 분석 등에 사용
- 자율주행차 적용 사례 : 주변 동적 객체의 과거 경로로부터 미래 경로 예측
- 특히 Long Short Term Memory(LSTM) 모델이 유명함
퀴즈)
1. CNN 구조는 주로 어떠한 입력 형태에 주로 사용되는 것인가요?
1. 음성 데이터
2. 시계열 데이터
3. 영상 데이터
4. 언어 데이터
답 3
2. RNN 구조는 자율주행에서 주로 어떠한 작업에 사용될 수 있을까요?
1. 예측
2. 분류
3. 제어
4. 영역분할
답 1(RNN 구조는 일반적으로 시계열 데이터를 기반으로 미래를 예측하는데 주로 사용)
반응형
'전자공학 > 자율주행' 카테고리의 다른 글
| [H-모빌리티 클래스 자율주행 인지 기초 내용 정리] 7. 카메라 센서 개요 (0) | 2022.02.11 |
|---|---|
| [H-모빌리티 클래스 자율주행 인지 기초 내용 정리] 6. 딥러닝 기반 인지시스템 사례 (0) | 2022.02.11 |
| [H-모빌리티 클래스 자율주행 인지 기초 내용 정리] 4. 인지를 위한 AI 기술 (0) | 2022.02.11 |
| [H-모빌리티 클래스 자율주행 인지 기초 내용 정리] 2. 자율주행 인지 기술 개념 (0) | 2022.02.11 |
| [H-모빌리티 클래스 자율주행 인지 기초 내용 정리] 1. 자율주행 자동차의 센서 구성 (0) | 2022.02.11 |

댓글